ПтПЈЛњЦїШЫDHБэЪОЗЈВЮЪ§ЩшЖЈВНжш
ЗЂВМЪБМфЃК2021-03-26 фЏРРДЮЪ§ЃК1605
ЗЕЛиСаБэФњЪЧЗёЖдНЋЙЄвЕздЖЏЛЏМЏГЩЕНФњЕФЩшЪЉжаИааЫШЄЃПШчЙћЪЧетбљЃЌФЧУДФњгІИУжТЕчЙЄвЕздЖЏЛЏКЭМЏГЩСьгђЕФСьЕМепЙЄВЉЪПЁЃЙЄВЉЪПЪЧАќРЈFANUCЃЌYaskawaЃЌKUKAЃЌKawasakiКЭABBдкФкЕФЖрМвВЛЭЌЛњЦїШЫЙЋЫОЕФШЯжЄМЏГЩЩЬЁЃЮвУЧЕФдБЙЄжТСІгкАяжњФњЮЊФњЕФаавЕКЭдЄЫуЙЙНЈКЭЖЈжЦЭъУРЕФздЖЏЛЏЯЕЭГЁЃ
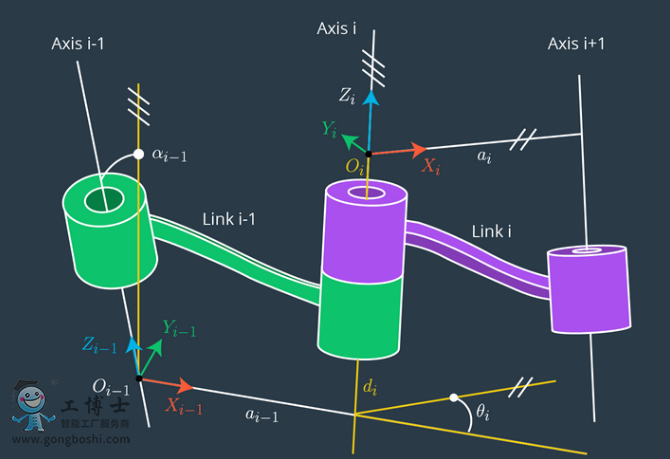
вЛЁЂКЮЮЊDHВЮЪ§ЃК
DHВЮЪ§ОЭЪЧвЛИігУЫФИіВЮЪ§БэДяСНЖдЙиНкСЌИЫжЎМфЮЛжУНЧЖШЙиЯЕЕФЛњаЕБлЪ§бЇФЃаЭКЭзјБъЯЕШЗЖЈЯЕЭГЁЃБОЮФВЩгУЕФЪЧJohn J CraigЕФЮФеТ(ЪЕМЪЛЙгаСэЭтвЛжжDHБэЗНЗЈЃЌгжГЦБъзМаЭЃЉЃК
ЫЕУїЃК
гаСЫDHВЮЪ§ЮвУЧОЭПЩвдЛёШЁЦыДЮБфЛЛОиеѓЃК
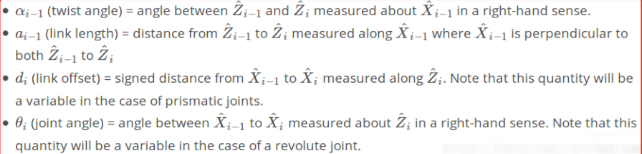
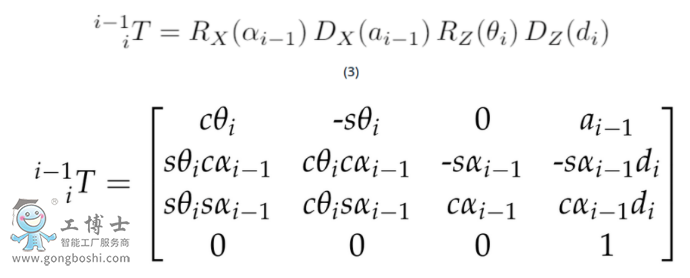
ЖўЁЂШЗЖЈDHБэЪОЗЈВЮЪ§ЃК
ЕБГіЯжЯТЭМЧщПіЪБЃК
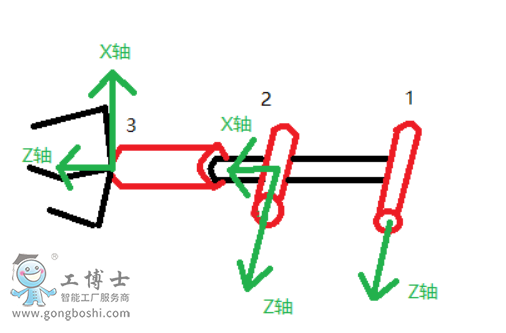
ИљОнЩЯЭМРДПДЃЌетгІИУЪЧИљОнИФНјЕФDHЗЈНЈСЂСЌИЫзјБъЯЕЁЃФПЧАDHЗЈЪЧгаСНжжБэЪОЗНЪНЕФЃЌвЛжжЪЧБъзМDHЗЈЃЌСэвЛжжОЭЪЧИФНјЕФDHЗЈЁЃЪзЯШФугІИУвЊИуЧхГўетСНжжЕФЧјБ№ЁЃдкгУDHЗЈЕФЪБКђвЛЖЈвЊАбЮевЛИіЙцТЩ,МДЃКБъзМDHЗЈжаСНИіСЌИЫзјБъЯЕБфЛЛЪЧЯШЖЏzжсКѓЖЏxжсЃЈЯШШЦzжсзЊЖЏЁЂЦНвЦЃЌдйШЦxжсзЊЖЏЁЂЦНвЦЃЉЃЌЖјИФНјЕФDHЗЈдђЪЧЯШЖЏxжсКѓЖЏzжсЁЃФуЯждкЭМжаЕФЮЪЬтдђашвЊвЛаЉИФЖЏВХФмгУИФНјЕФDHЗЈБэЪОЁЃАДееЭМЩЯаоИФЙ§КѓЃЌ2жс3жсжЎМфЕФЙиЯЕМДПЩгУИФНјЕФDHЗЈРДБэЪОСЫЃКжс2ЕФзјБъЯЕЪзЯШШЦ2жсЕФxжса§зЊ-90ЖШЃЈα=-90°ЃЉЃЌШЛКѓбизХzжсвЦЖЏвЛЖЮЦЋОрdЁЃвђЮЊВЛбизХxжсвЦЖЏЃЌвђДЫa=0ЁЃ
DHЗЈВЂВЛЪЧ***ЕФЃЌЫќвВЪЧгаОжЯоЕФЃЌЯЃЭћЬтжїдйКУКУбаОПвЛЯТЁЃ
ЙЄВЉЪППЩвдЬсЙЉСЫABBЃЌПтПЈЃЌАВДЈЃЌЗЂФЧПЦКЭХЗЕиЯЃЕШИїжжЦЗХЦЛњЦїШЫКЭГЃгУЛњЦїШЫаЭКХЃЌВЂЧвАќРЈЛњЦїШЫЕФХфМўЃЌБЃбјЃЌЮЌаоЃЌХрбЕЕШЕШЗўЮёЮвУЧЖМПЩвдНјааЗўЮёЃЌеце§зіЕНСЫЮЊПЭЛЇНјаавЛеОЪНЕФЗўЮёБЃеЯЃЌВЂЧвЙЄВЉЪПЯжвбОЪЧМЏОХДѓЛњЦїШЫДњРэЦЗХЦгквЛЬхЕФжЧФмЙЄГЇвЛеОЪНЗўЮёЩЬЃЌЮвУЧЯраХЃЌЮвУЧеце§ЕидкажњЕкЫФДЮЙЄвЕИяУќЕФНјВНЃЌВЂЮЊЫљгаЩцМАЛњЦїШЫММЪѕЕФШЫУЧдіМггХЪЦКЭЪевцЃЁШчЙћФњЯыЛёЕУИќЖраХЯЂЃЌЧыдкЯпСєбдЛђжТЕчгыЮвУЧСЊЯЕ ЁЃ
СЫНтЛњЦїШЫИќЖраХЯЂПЩЕуЛїзЩбЏЃКПтПЈЛњЦїШЫБЃбјЁЂПтПЈЛњЦїШЫЮЌао
ИќЖрПтПЈЛњЦїШЫБОЬхЯњЪлЁЂБЃбјЁЂЮЌаоПЩЕуЛїзЩбЏЃКhttp://kuka-jqrbaoyang.gongboshi.com/

 ВњЦЗ:19
ВњЦЗ:19
 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ